Usare le nuvole di punti nel modo giusto
Ogni volta che è necessario creare un modello dettagliato di un’area, per il rilevamento, la ricostruzione di un incidente o per qualsiasi altro scopo, la creazione di una nuvola di punti può essere il modo migliore per portare a termine il lavoro.
Un modello di nuvola di punti 3D accurato, dettagliato e ad alta risoluzione è un elemento importante per la creazione di un modello 3D accurato. Se la tua organizzazione è alla ricerca di un nuovo modo per creare ricostruzioni digitali di spazi o strutture fisiche, i droni in grado di generare nuvole di punti potrebbero essere lo strumento perfetto per te.
Imparando di più sulle nuvole di punti – cosa sono, come le generi, diversi approcci e casi d’uso – potrai capire come integrare al meglio questi strumenti digitali nei tuoi flussi di lavoro.
La tecnologia LiDAR ha consentito alla polizia stradale di raccogliere i dati della nuvola di punti di questo incidente nonostante le condizioni di scarsa illuminazione notturna
Nuvole di punti: è tutta una questione di prospettiva
Che cos’è esattamente una nuvola di punti? È una raccolta di punti dati mappati in tre dimensioni. Ogni punto ha i suoi valori X, Y e Z in base a dove si trova nello spazio. Alcune nuvole di punti possono avere una risoluzione eccezionalmente alta, a centinaia di singoli punti per metro quadrato, per mostrare esattamente cosa c’è in uno spazio 3D.
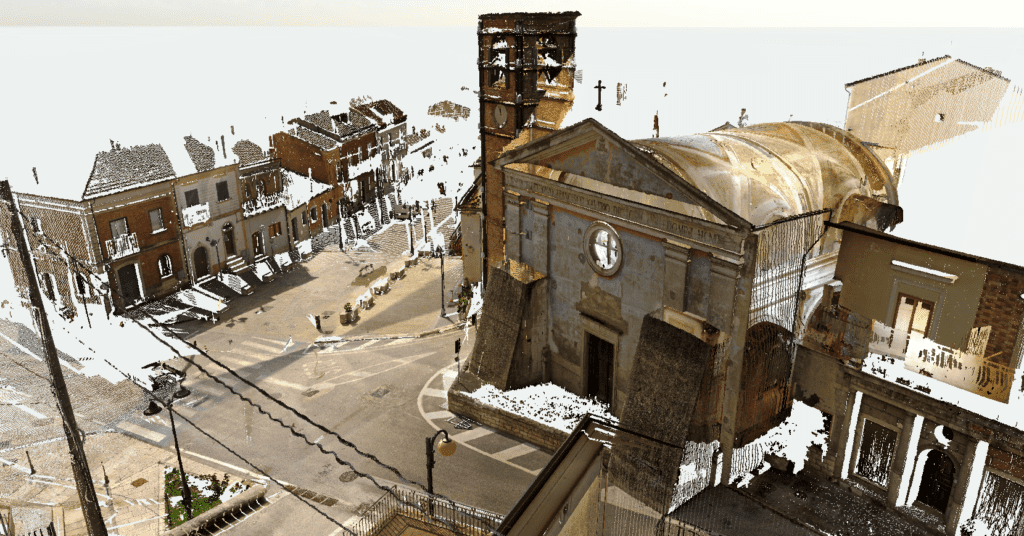
Nuvola di punti di due torri di raffreddamento realizzate in preparazione della loro demolizione in sicurezza
I punti insieme denotano le superfici degli oggetti e le caratteristiche del terreno all’interno di un’area, il che consente a topografi o ispettori di creare mappe 3D e modelli estremamente accurati di tali aree. Tuttavia, la nuvola in sé non è la mappa. È necessario un altro set di dati oltre ai punti dati di elevazione per creare un modello più completo.
Per generare queste nuvole di punti, hai bisogno dell’attrezzatura adeguata e di una nuova prospettiva della tua area di destinazione: vale a dire, una veduta aerea. Volando con un veicolo aereo senza equipaggio (UAV) sulla tua area prescelta, puoi raccogliere le informazioni necessarie su elevazione e topografia.
I droni avanzati dotati dei più recenti sensori di rilevamento e rilevamento della luce (LiDAR) possono creare nuvole di punti in un unico passaggio. Un drone che utilizza un sistema di fotocamere fotogrammetriche può assemblare una nuvola di punti come uno degli output dell’immagine tridimensionale risultante. In entrambi i casi, la nuvola risultante è un’immagine dettagliata e accurata dell’area scansionata.
Come funzionano le nuvole di punti
Come funziona esattamente il processo di creazione della nuvola di punti? Mentre i dettagli esatti dipendono dal fatto che il tuo drone sia dotato di sensori LiDAR o apparecchiature di fotogrammetria, la procedura è la stessa.
Il tuo UAV sorvola un’area prescelta, scansionando con il suo carico utile di sensori. Le informazioni sui punti rilevati vengono quindi assemblate in una forma utilizzabile tramite un software di elaborazione delle nuvole di punti, come DJI Terra.
Per ottenere il risultato di una nuvola di punti 3D, il software aggiungerà contesto a un vasto numero di punti rilevati da impulsi laser o genererà punti basati su una raccolta di foto scattate da più angolazioni. Questo dipende dalla scelta di LiDAR o fotogrammetria, e questo a sua volta sarà deciso dal tipo di rilevamento o mappatura che stai facendo.
La differenza tra nuvole di punti LiDAR e nuvole di punti fotogrammetriche
I due metodi principali per creare una nuvola di punti dai dati UAV, LiDAR e fotogrammetria, hanno ciascuno i loro casi d’uso ideali. Potresti finire per usare entrambi in vari momenti.
Le aziende che mappano frequentemente aree complesse e ricche di vegetazione possono gravitare verso il LiDAR, mentre le aziende che si occupano di visuali chiare e che necessitano di una soluzione a basso costo possono iniziare con la fotogrammetria, ma la decisione non può essere ridotta a uno o due problemi. Confrontare le tecnologie fianco a fianco è un esercizio utile per decidere come equipaggiare i tuoi UAV.
LiDAR
La scansione LiDAR emette impulsi laser ad altissima velocità che “battono” su una superficie e tornano all’emettitore. Utilizzando la misurazione inerziale e i dati di posizionamento satellitare, il sensore LiDAR del drone determina esattamente dove si trova un punto nello spazio.
I punti raccolti diventano una nuvola di punti LiDAR quando vengono assemblati da un software specializzato per nuvole di punti. Questo è un metodo di scansione ad alta precisione, anche se deve essere abbinato ad altri dati per aggiungere più dettagli alle mappe, incluso il colore.
Il sistema LiDAR è ottimo per mappare elementi troppo piccoli per essere rilevati con altri metodi. Ad esempio, se devi mappare cavi sottili o linee elettriche come parte della tua nuvola di punti, puoi farlo raccogliendo dati LiDAR. La tecnologia funziona anche in condizioni di scarsa illuminazione e può raggiungere il suolo attraverso strati di fogliame.
Inoltre, poiché le nuvole di punti LiDAR sono misurazioni dirette, le dimensioni dei file sono relativamente più piccole rispetto alle fotografie ad alta risoluzione utilizzate per la fotogrammetria. Ciò significa che la post-elaborazione dei dati LiDAR è più veloce dell’estrazione delle nuvole di punti dai modelli di fotogrammetria e questo può essere un fattore importante per i clienti che danno priorità all’efficienza o che hanno missioni urgenti.
Fotogrammetria
La fotogrammetria assembla proiezioni di dati da fotografie. Si tratta di un approccio economico e diretto al rilevamento e alla mappatura; e il software necessario per lavorare con i dati di fotogrammetria è disponibile tramite un semplice modello basato su cloud.
L’uso della fotogrammetria è flessibile. Puoi decidere quanto velocemente far volare il drone, a seconda del livello di dettaglio necessario per le mappe o le nuvole di punti 3D che stai generando per il progetto in corso.
A seconda del livello di dettaglio che scegli e delle dimensioni dell’area che stai rilevando, la fotocamera UAV scatterà centinaia o migliaia di fotografie. Queste immagini sono colorate e, oltre a diventare nuvole di punti 3D, possono essere assemblate in una mappa o in un modello 3D.
Poiché la fotogrammetria si basa sulla fotografia, per funzionare è necessaria una fonte di luce, naturale o artificiale. Detto questo, la generale facilità d’uso del metodo può supplire all’inconveniente di cercare le giuste condizioni. Le barriere relativamente basse all’ingresso possono rendere questo un ottimo primo metodo per un’azienda che ha appena iniziato a creare nuvole di punti 3D o altri modelli di dati.
Usi della modellazione della nuvola di punti
Una volta generate le nuvole di punti 3D, per cosa le usi?
Le applicazioni saranno diverse in base al tuo settore, ma tutte si concentrano sulla necessità di modelli 3D accurati.
- Infrastrutture elettriche: il rilevamento di nuove infrastrutture di servizi è più semplice e veloce quando i team hanno accesso ai droni e sono in grado di creare nuvole di punti 3D delle aree in questione. Questo può essere particolarmente utile per risorse come linee elettriche costruite in aree remote dove le squadre avrebbero problemi a navigare a piedi.
- Costruzione di petrolio e gas: come per i servizi elettrici, le raffinerie di petrolio e gas richiedono spesso informazioni 3D accurate su vaste aree, potenzialmente in località remote. Questo è un altro scenario in cui i droni possono dimostrarsi più efficaci delle squadre di rilevamento a terra.
- Rilievo del territorio: i clienti interessati a ottenere rapidamente mappe topografiche dettagliate delle aree possono beneficiare delle nuvole di punti 3D generate tramite l’uso dei droni. La combinazione di rilevamento rapido per vaste aree e precisione di alto livello è l’ideale per il rilevamento.
- Silvicoltura: il LiDAR può penetrare nel fogliame denso e fornire dati di superficie che non sarebbero risolti con la fotogrammetria.
Dopo aver determinato l’ambito applicativo per un’accurata nuvola di punti 3D, devi semplicemente trovare il drone giusto e il sensore migliore per raccogliere le informazioni.
I droni e i payload da utilizzare nei diversi casi
Con che tipo di drone volerà la tua squadra nel tuo prossimo incarico di generazione di nuvole di punti e quale sarà il sensore?
Quando lavori con DJI hai molte opzioni, tra cui:
- Scelta del drone: la scelta del drone è determinata dalla missione e dalle condizioni di lavoro. Matrice 300 RTK è una buona scelta per la generazione di nuvole di punti 3D. Può operare in un’ampia varietà di condizioni ambientali e fornire 55 minuti di volo mentre equipaggia il tuo pacchetto di sensori preferito.
- Payload LiDAR: Zenmuse L1 è il primo sistema LiDAR UAV disponibile tramite DJI e il suo elenco di funzionalità è impressionante. Questa soluzione consente la mappatura di 240.000 punti al secondo con un solo ritorno o fino a 480.000 punti al secondo con tre ritorni. Una fotocamera RGB integrata consente l’emissione di nuvole di punti a colori reali e Point Cloud LiveView in DJI Pilot consente di verificare se la raccolta dei dati sta procedendo correttamente.
- Payload fotogrammetrico: per gli utenti che preferiscono la fotogrammetria, DJI offre Zenmuse P1. Questo sistema può scattare una foto ogni 0,7 secondi per creare rapidamente modelli accurati e dettagliati per la conversione in nuvole di punti 3D.