Il SuperBonus 110% è un nuovo incentivo fiscale per la riqualificazione energetica e sismica degli edifici esistenti, previsto dal Decreto Rilancio, per migliorare la qualità dei nostri edifici.
110% è l’aliquota incentivante per specifici interventi in ambito di efficienza energetica, di interventi antisismici, di installazione di impianti fotovoltaici o delle infrastrutture per la ricarica di veicoli elettrici negli edifici.
La detrazione è riconosciuta nella misura del 110% da ripartire tra gli aventi diritto in 5 quote annuali successivi.
I beneficiari di questo SuperBonus sono molteplici: condomini, persone fisiche, organizzazioni non lucrative di utilità sociale, associazioni, ecc…
Per poterlo ottenere uno dei requisiti fondamentali è che gli interventi comportino il miglioramento di almeno due classi energetiche.
In particolare, gli interventi che beneficiano del bonus si distinguono in interventi trainanti e interventi trainati.
Negli interventi trainanti, ad esempio, rientrano il cappotto termico e l’adeguamento sismico che se realizzati (almeno uno dei due) permette di inserire altri interventi che possono essere detratti al 110% (interventi trainati).
Una volta verificata la prima parte dell’iter per l’accesso al Superbonus 110% arriva il momento dell’esecuzione dei lavori, con i rilievi sul campo.
Gli operatori si trovano ad affrontare impegnative sessioni di rilievo che con le strumentazioni tradizionali, quali il disto e la Stazione Totale, potrebbero richiedere lunghe e numerose giornate lavorative. Senza considerare che gran parte del lavoro dovranno eseguirlo in studio disegnando manualmente sezioni e prospetti e qualsiasi altro elemento considerato utile al fine dell’intervento.
Caso studio di una palazzina per il SuperBonus
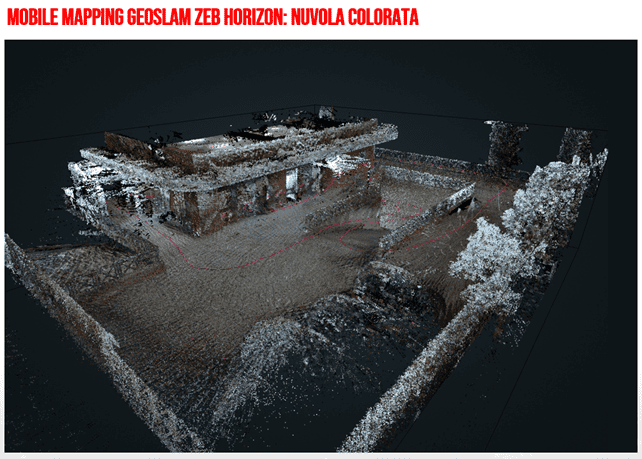
Il caso riportato di seguito riguarda un rilievo di una palazzina composta da quattro piani più uno interrato adibito a garage. Per la grandezza e la tipologia di fabbricato, affrontare il rilievo con gli strumenti tradizionali costringerebbe gli operatori a ritornare più e più volte sul campo, con conseguente perdita di tempo prezioso e un ammontare di costi non previsti.
Anche l’utilizzo di strumentazioni più recenti e veloci come i Laser Scanner statici potrebbe non essere la strategia più efficace. I Laser Scanner statici, infatti, nonostante garantiscano molti vantaggi rispetto alla Stazione Totale, tra cui i tempi di acquisizione dei dati notevolmente più bassi e l’ottenimento di un modello 3D completo, in questo caso specifico impiegherebbero diversi giorni di lavoro per acquisire l’intero fabbricato compreso gli immobili e la parte esterna.
Per questa tipologia di scenario si è deciso, quindi, di impiegare uno strumento capace di ottenere il massimo rendimento senza scendere a compromessi con la qualità del dato acquisito.